Пневматические робопальцы сделали съедобными

В последние годы интерес исследователей к «мягкой» робототехнике растет. По сравнению с твердотельными системами, такие устройства имеют ряд преимуществ: потенциально они дешевле в производстве и обслуживании, а также обладают упрощенными механизмами управления и структурой, которая может меняться без ущерба для прочности. Кроме того, мягкие роботы могут быть изготовлены из различных, в том числе биосовместимых и биоразлагаемых, материалов. Это позволяет использовать таких роботов в медицине, например для доставки препаратов к нужным органам.
К настоящему времени разработано несколько биоразлагаемых элементов, которые могут использоваться при создании мягких медицинских роботов. Так, уже известны прототипы съедобных электродов, транзисторов, аккумуляторов, конденсаторов и датчиков. Однако возможности для изготовления биоразлагаемых приводов изучены недостаточно. Предложенные модели актуаторов (из желатинового гидрогеля и свиной кишки) предполагают активацию путем внешнего воздействия - с помощью магнитного и электрического поля. Это затрудняет управление роботом и требует присутствия квалифицированного оператора.
В новой статье инженеры из Национального центра научных исследований (NCCR) в области робототехники и Федеральной политехнической школы Лозанны описали технологию создания пневматического биоразлагаемого актуатора по схеме силиконового эластомера. На первом этапе авторы смешали глицерин, желатин и воду в разных пропорциях при 80 градусах Цельсия, после чего поместили раствор в акриловую форму и высушили при 25 градусах Цельсия. Спустя 48 часов мембрану толщиной 0,5 миллиметра разрезали на фрагменты и проверили на прочность. Анализ показал, что более высокий модуль Юнга имеет материал, изготовленный из смеси в пропорциях 1:1:8 соответственно.
Аналогичным образом ученые получили трехмерный прототип актуатора - сплошную желатиновую структуру с полуизолированными камерами на подложке и трубкообразным отверстием с одной из сторон. Ширина прототипа составила 20 миллиметров, длина - 90 миллиметров, высота - 17 миллиметров. При подаче в отверстие сжатого воздуха актуатор быстро (за 0,5 секунды) сгибался и вновь разгибался, когда подача воздуха прекращалась. Испытания материала проводились на компрессорной установке: в ходе тестов системе из двух актуаторов удалось поднять, не повредив, вареное яйцо, и относительно тяжелые предметы, например бутылек из-под жвачки весом 153,1 грамма. Максимальный угол изгиба, который оказался доступен желатиновому актуатору, составил 170,3 градуса при давлении 25 килопаскалей.
По словам авторов, механические свойства нового актуатора сопоставимы с силиконовыми аналогами, при этом в будущем он может использоваться для диагностики (при размещении датчиков) или лечения внутренних органов, в том числе кишечника. В ближайшее время команда намерена изучить долговечность и вязкоупругость съедобного устройства, а также повысить минимальную температуру плавления материала: сейчас она не превышает 35 градусов Цельсия. Предполагается, что добавление в раствор хитозана позволит увеличить показатель до 67 градусов Цельсия.
Способ изготовления мягких роботов сильно зависит от сложности их структуры. Нередко с этой целью используется 3D-печать: так, с ее помощью ученые создали первого автономного октобота и пневматическое щупальце. При производстве биороботизированных систем применяется иная технология, в частности функцию силикона в них выполняют живые клетки.

Последние новости раздела
-
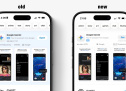
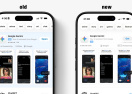
Apple изменила интерфейс App Store: реклама больше не выделяется цветом
-
Китайские ученые заявили о прорыве в энергетике: создана альтернатива литиевым аккумуляторам
-

Google расширяет возможности Gemini: ИИ получит доступ к истории поиска, YouTube и личным данным пользователя
-

Sid Meier’s Civilization VII станет доступна в Apple Arcade уже 5 февраля