Сотрудники Калифорнийского университета разработали робота-паркурщика

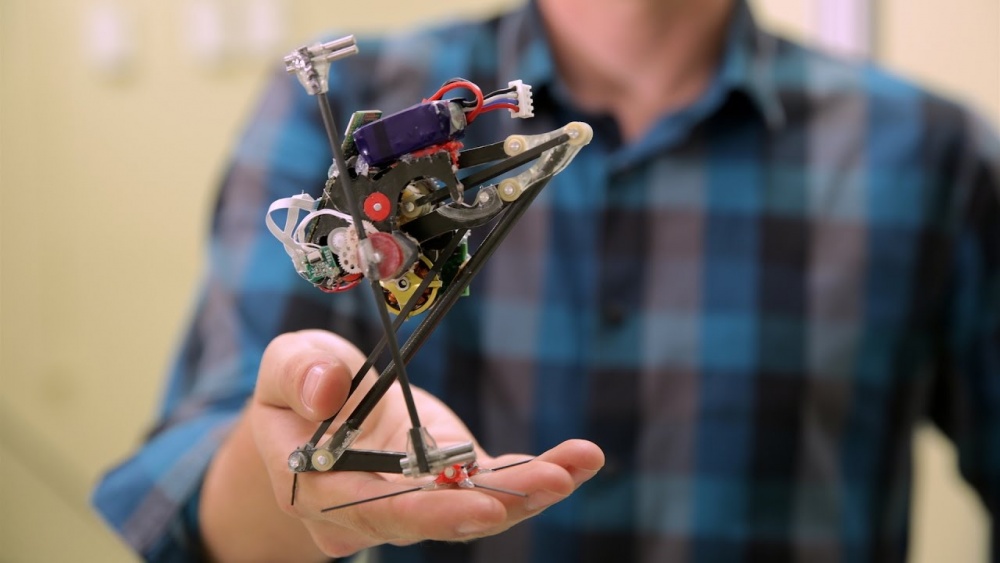
Робототехники из Калифорнийского университета в Беркли некоторое время работают над крошечным роботом Salto, чье имя расшифровывается как SAltatorial Locomotion on Terrain Obstacle. Планируется, что в будущем этот кроха сможет передвигаться прыжками по различным сложным поверхностям и даже приходить на помощь сотрудникам спасательных служб. Уже сегодня созданный калифорнийскими инженерами робот демонстрирует неплохие результаты в плане высоты и дальности своих прыжков.
Автор робота Salto - робототехник по имени Дункан Хэлдейн. В своей работе Дункан вдохновлялся живой природой, а именно приматами семейства Галаго, обитающими на территории Африки. Эти небольшие зверьки совершают невероятно длинные прыжки, убегая от хищников и охотясь на насекомых. К примеру, за пять прыжком зверек способен преодолеть расстояние около 10 метров. Инженер тщательно изучил строение этих необычных животных и пришел к выводу, что секрет их «прыгучести» заключается в умении очень низко приседать и накапливать энергию перед прыжком. Именно эта особенность, получившая название «управление силой», легла в основу Salto.
Крошечный робот способен подпрыгивать на метр в высоту, что, учитывая его размеры (26 сантиметров, если вытянуть его в полный рост), довольно неплохой показатель. Более того, на сегодняшний день эта высота является рекордом для «непривязанного робота», то есть для робота, который не скован никакими проводами с вычислительными устройствами. Разработчики даже научили его прыгать, а затем отталкиваться от стен. В будущем они снабдят робота несколькими камерами, чтобы он сам мог выбирать опоры, от которых ему можно оттолкнуться в прыжке. Пока же, разумеется, все прыжки совершаются по заранее рассчитанным траекториям в лабораторных условиях. В данный момент инженеры работают над тем, чтобы усовершенствовать шарниры робота, уменьшить его вес (сейчас он весит около 100 граммов), а также увеличить мощность его мотора, сделав прыжки Salto еще более быстрыми и эффективными.

Последние новости раздела
-
Китайские ученые заявили о прорыве в энергетике: создана альтернатива литиевым аккумуляторам
-

Google расширяет возможности Gemini: ИИ получит доступ к истории поиска, YouTube и личным данным пользователя
-

Sid Meier’s Civilization VII станет доступна в Apple Arcade уже 5 февраля
-

Hytale официально вышла в ранний доступ: долгожданная «наследница Minecraft» доступна игрокам