Сальто назад и паркур: как видят и двигаются роботы Atlas от Boston Dynamics
Американская компания по производству роботов Boston Dynamics подробно рассказала о движениях ботов Atlas, которые могут делать сальто, бегать и прыгать без подготовки.
По словам инженеров, паркур помогает изучить поведение роботов, которым необходимо ориентироваться в пространстве и реагировать на окружение в режиме реального времени.
Для ориентирования в пространстве используется информация с различных датчиков, таких как камеры и лидары. Данные необходимы для выставления положения суставов и настройки датчиков силы - с их помощью робот передвигается в зависимости от преград.
Atlas также использует камеру глубины для анализа параметров предметов и расстояния к ним. После этого информация попадает в картографическую систему, которая строит модели различных объектов, видимых камере робота.
Читайте
Инженеры дают роботу подробную карту препятствий и приблизительный маршрут, по которому Atlas должен следовать. На основе полученных данных двуногий бот должен сам рассчитать траекторию движения для выполнения различных трюков.
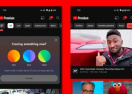
"Мозг" робота окрашивает предметы в зоне видимости зеленым цветом, а затем меняет оттенок предмета по мере отдаления.
Каждое из движений, которые выполняет Atlas во время паркура, основано на шаблоне, созданном заранее с использованием оптимизации траектории. Роботу достаточно проанализировать окружение и выбрать нужное движение из библиотеки.
Ранее Boston Dynamiscs поделилась видеороликом, в котором гуманоидные роботы Atlas занимаются паркуром. Боты с легкостью преодолевают полосу препятствий - бегают, прыгают, в конце - синхронно делают сальто назад. На создание видеоролика ушло несколько месяцев обучения двуногих машин.
Последние новости раздела
-

В США представили самый компактный ИИ-суперкомпьютер в мире
-

Ubisoft экстренно отключила серверы Rainbow Six Siege из-за масштабной хакерской атаки
-

Новая игровая мышь Logitech G304 X Lightspeed - легче, быстрее и автономнее
-

Asus может начать собственное производство DRAM к 2026 году на фоне глобального дефицита памяти