Немцы научились управлять сложным «магнитным» роботом
Существующие методы управления роботами с помощью магнитного поля ограничивают дизайн таких устройств. Дело в том, что до недавних пор подобные технологии не позволяли воздействовать на отдельные актуаторы изолированно, что затрудняло применение «магнитных» роботов, например, в медицине, где от них требуется слаженно действовать внутри живого организма.
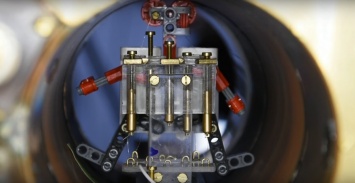
В новой работе ученые из немецких подразделений компании Philips представили технологию, которая позволяет манипулировать сложными роботами с помощью магнитного поля. В качестве источников поля выступают несколько пар катушек, находящихся под контролем операторов. В месте, где поля встречаются, возникает зона низкой индукции, которая и используется для управления.
Актуаторы выполняются на основе винтов с магнитными кольцами, которые вкручиваются или выкручиваются под воздействием магнитного поля. При росте общей индукции актуаторы блокируются, и вращение катушек приводит в действие только тот винт, который находится в зоне низкой индукции. Таким образом достигается точечное управление на расстоянии до трех миллиметров.
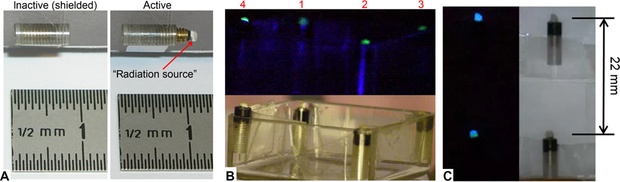
В ходе демонстрации авторы испытали технологию на пяти пластиковых винтах, капсулах с условным токсическим веществом, а также роботе с пятью независимыми актуаторами. По их мнению, новый подход может использоваться в медицине, например брахитерапии. В частности, метод позволит прицельно управлять радиоактивными капсулами в разных местах опухоли.
Последние новости раздела
-

IKEA представила на CES 2026 ультрабюджетные Bluetooth-колонки Kallsup, которые можно объединять в сеть до 100 устройств
-

Nvidia выпустила нативное приложение GeForce NOW для Linux
-

Релиз GTA VI вновь под вопросом: Rockstar может отложить выход игры
-

Dell смещает фокус: ИИ перестал быть главным аргументом при продаже техники