Создан новый тип роботизированной руки для работы под водой
Изучение подводного мира становится практически невозможным без использования специальной вспомогательной робототехники - речь идет преимущественно об использовании особого класса умной робототехники, обладающей как высоким уровнем надежности, так и высоким уровнем гибкости. Сегодня специалисты по робототехнике из Университета Уисс представили свою новую разработку, представляющую собой роботизированную руку, собранную из мягких материалов, отпечатанных на 3D-принтере, которая может осуществлять самые тонкие виды работ под водой - к примеру, ловля микроорганизмов и расчистка участков для поиска тех или иных ископаемых или материалов.
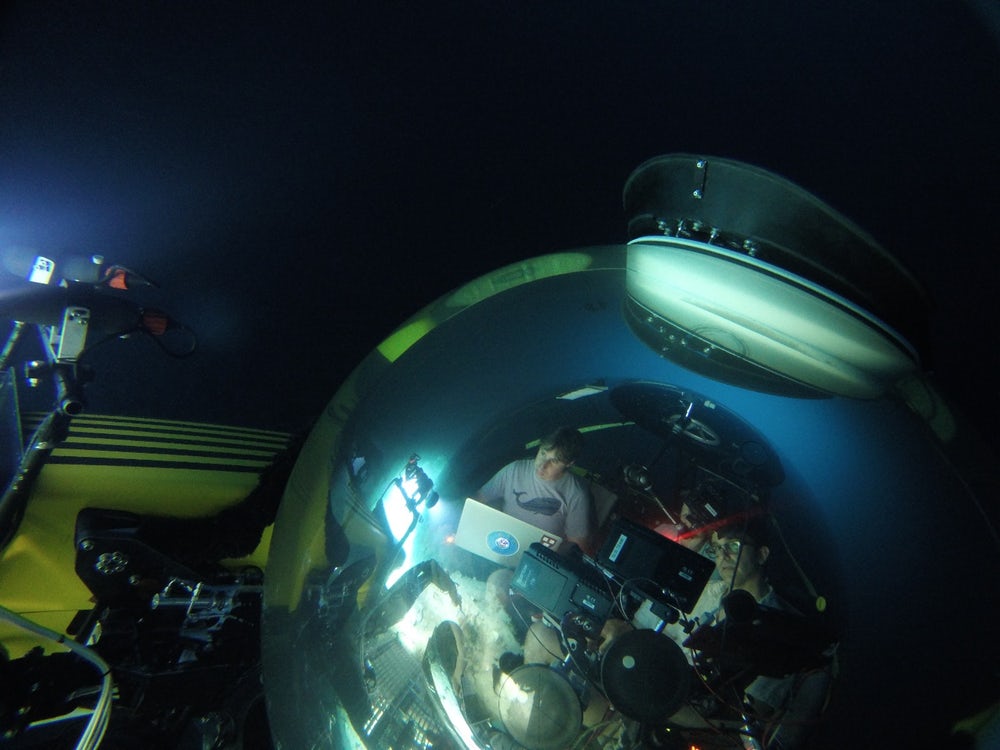
Рука не является автономной в полном смысле этого слова - ею управляет непосредственно человек-оператор, который подключается к специальной "перчатке", через которую происходит управление рукой. В самой перчатке располагаются провода и сенсоры, соединенные с аналогичными сенсорами в самой руке. Кроме того, за счет использования гибких и мягких материалов, специалистам удалось достичь действительно высокий уровень точности при осуществлении тех или иных тонких работ.
Питается рука при помощи гидравлического мотора небольших размеров, прикрепленного в свою очередь к специальной подводной конструкции, которая также может перемещаться свободно, в зависимости от намерений оператора. Стоит отметить, что работа над разработкой длилась достаточно долго, и в ней также принимали участие специалисты из Гарвардского Университета - а большая часть работ по конструкции производилась на Род-Айленде, где специалисты активно консультироваться с местными профессионалами в области робототехники.
При этом отмечается, что у роботизированной руки действительно большой запас мощности и в целом она обладает поистине высоким уровнем надежности в отношении устойчивости к морскому глубоководному давлению. В дальнейшем внимание команды сосредоточено на том, чтобы придать модели руки некоторые дополнительные функции и возможности - в частности, возможность поднимать пойманные образцы микроорганизмов и рыб на поверхность для дальнейшего изучения.

Последние новости раздела
-

Hytale официально вышла в ранний доступ: долгожданная «наследница Minecraft» доступна игрокам
-

Тайвань выдал ордер на арест основателя OnePlus Пита Лау по делу о незаконном найме инженеров
-

Anthropic запустила Claude Cowork - ИИ-агента, способного самостоятельно управлять файлами на компьютере пользователя
-

LEGO и Pokemon возвращают культовую коллекцию: легендарных монстров теперь можно собрать из кубиков