Робототехники из Корнуэлла создали необычную робото-перчатку

Талантливая команда специалистов по робототехнике из Университета Корнуэлла сегодня представила нечто действительно уникальное в этом сегменте технологий - речь идет о новом формате робототехнической руки-перчатки, которая обладает действительно уникальным и многофункциональным набором сенсоров и датчиков, предоставляющие необычайно точный и комплексный подход к симуляции различных тактильных ощущений. Согласно предварительным тестированиям нового робототехнического материала, специалисты сумели настолько увеличить его тактильную отдачу и гибкость, что он может найти свое применение в самом широком круге целей и направлений деятельности.
В частности, такая робото-перчатка может стать неотъемлемой частью практически любого опыта виртуальной и дополненной реальности, а также найти свое применение в медицинской сфере - например, в деле физиотерапии. В основе новой разработки лежит применение специального композитного материала на основе оптического микроволокна и недорогих LED-сенсоров, которые в совокупности - а также с добавлением некоторых дополнительных элементов, которые пока держатся в секрете - позволяют добиваться действительно высокого уровня точности и гибкости в управлении.
Иными словами, данный набор микросенсоров мягкого типа является действительно подходящим для того, чтобы использовать такую робото-перчатку практически во всех направлениях и сферах, где необходимо получать как можно более точную и реалистичную тактильную отдачу, ведь данная разработка может считывать такие параметры, как давление, сжатие и направление движения отдельных пальцев, что не может не удивлять даже в контексте наиболее уникальных разработок такого типа.
Стоит отметить, что на данный момент времени команда разработчиков из Корнуэльского Университета пока отнюдь не торопиться реализовывать сколь-нибудь сложные подходы относительно данной разработки, поскольку усматривает в ней слишком много условностей - с другой стороны, скорее всего именно она станет чем-то вроде универсальной платформой для реализации еще более сложных и многофункциональных вариантов таких разработок по мягкой робототехнике. Пока лишь остается дожидаться окончательного завершения планирования.
Последние новости раздела
-
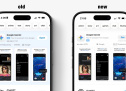
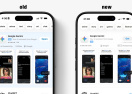
Apple изменила интерфейс App Store: реклама больше не выделяется цветом
-
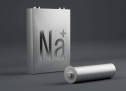
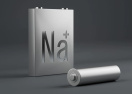
Китайские ученые заявили о прорыве в энергетике: создана альтернатива литиевым аккумуляторам
-

Google расширяет возможности Gemini: ИИ получит доступ к истории поиска, YouTube и личным данным пользователя
-

Sid Meier’s Civilization VII станет доступна в Apple Arcade уже 5 февраля