В Гарварде создали робота-паука из коктейльных трубочек
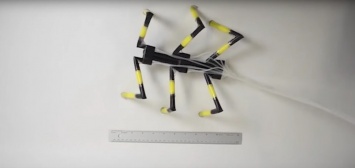
В Гарвардском университете создали робота-паука из коктейльных трубочек. Для этого инженеры вырезали щели в обычных пластиковых питьевых соломинках, чтобы сделать их гибкими. Затем на эти выемки они надели пробки, которые выполняют функцию суставов, а от них идут полоски резины, которые выполняют роль своеобразных сухожилий. Когда пробка раздувается, сустав выгибается наружу, а когда она сдувается, сухожилие сгибает конечность обратно.
Затем инженеры начали добавлять роботу все больше и больше ног. Робот с одной ногой был просто каплей, которая может только тащить себя вперед. После добавления второй ноги на другой конец, робот мог двигаться, толкаясь одной ногой и подтягивая себя другой. Когда ног стало шесть, робот начал двигаться, как муравей, руководствуясь микроконтроллером Arduino. При восьми ногах, разработчики столкнулись с ограничениями по сложности операций, которые может выполнить система. Однако, из-за легкого веса материалов, роботов был еще в состоянии плавать по воде и тащить себя по поверхности.
"Паук обладает способностью модулировать скорость. Но в нашем случае, движение в суставах двоично благодаря простоте нашей системы клапанов. Либо вы переключите клапан с источником давления, чтобы надуть шарик в суставе, и, таким образом согнуть конечность, или сдуваете шарик и, таким образом, вытягиваете конечность. Так что в случае восьминогого робота, нам пришлось разработать собственную походку, совместимую с бинарными движениями наших суставов. Я уверен, что это не новая походка, но мы не могли точно дублировать движения", - говорит Алексей Немировски, соавтор исследования.
Последние новости раздела
-
Китайские ученые заявили о прорыве в энергетике: создана альтернатива литиевым аккумуляторам
-

Google расширяет возможности Gemini: ИИ получит доступ к истории поиска, YouTube и личным данным пользователя
-

Sid Meier’s Civilization VII станет доступна в Apple Arcade уже 5 февраля
-

Hytale официально вышла в ранний доступ: долгожданная «наследница Minecraft» доступна игрокам