В Кембридже создали уникальную роботизированную руку для игры на фортепиано

Создать по-настоящему гибкое и многофункциональное тело и конечности робота, которые могли бы повторять аналогичные паттерны движения и поведения человеческих, очень сложная задача - однако для талантливой команды специалистов по робототехнике из Кембриджского Университета эта задача, судя по всему, является вполне себе преодолимой. Сегодня команда специалистов представила свою новую разработку, представляющую собой роботизированную руку с пальцами, выполненную на специальном 3D-принтере таким образом, чтобы научить ее играть на фортепиано примерно так же, как это осуществляет настоящий человек - при этом ни о какой степени дополнительной мобильности не идет речи!
Иными словами, специалисты сумели создать такую относительно гибкую кисть, не прибегая к чрезмерно массивному использованию различных актуаторов и соединения для каждого из пальца - что в теории должно существенно ограничить подвижность и степень свободы в движении кисти. Однако конечный результат демонстрирует совершенно противоположную картину - отпечатанная с помощью принтера Connex 5000 3D и присоединенная к руке робота UR5, кисть представляет собой сочетание мягких и жестких материалов, а ее функционирование осуществляется главным образом посредством искривления и поворота нижней части кисти.
Благодаря такому паттерну движения, кисть может наигрывать достаточно простые мелодии на фортепиано, управляясь соответствующими программными алгоритмами - то есть, ее работа осуществляется полностью автономно. И это является дополнительным аспектом, по которому можно отметить успешность проекта, так как одного лишь паттерна движения кисти вполне достаточно чтобы назвать проект сложным.
Впрочем, специалисты из Кембриджа не намерены останавливаться на достигнутом и в ближайшем будущем планируют значительно расширить функционал и особенности данной роботизированной кисти. Дело в том, что при случае крупного успеха проекта, специалисты могут вполне рассчитывать на действительно масштабное расширение своих аналогичных проектов в области робототехники.
Последние новости раздела
-
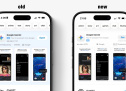
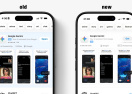
Apple изменила интерфейс App Store: реклама больше не выделяется цветом
-
Китайские ученые заявили о прорыве в энергетике: создана альтернатива литиевым аккумуляторам
-

Google расширяет возможности Gemini: ИИ получит доступ к истории поиска, YouTube и личным данным пользователя
-

Sid Meier’s Civilization VII станет доступна в Apple Arcade уже 5 февраля